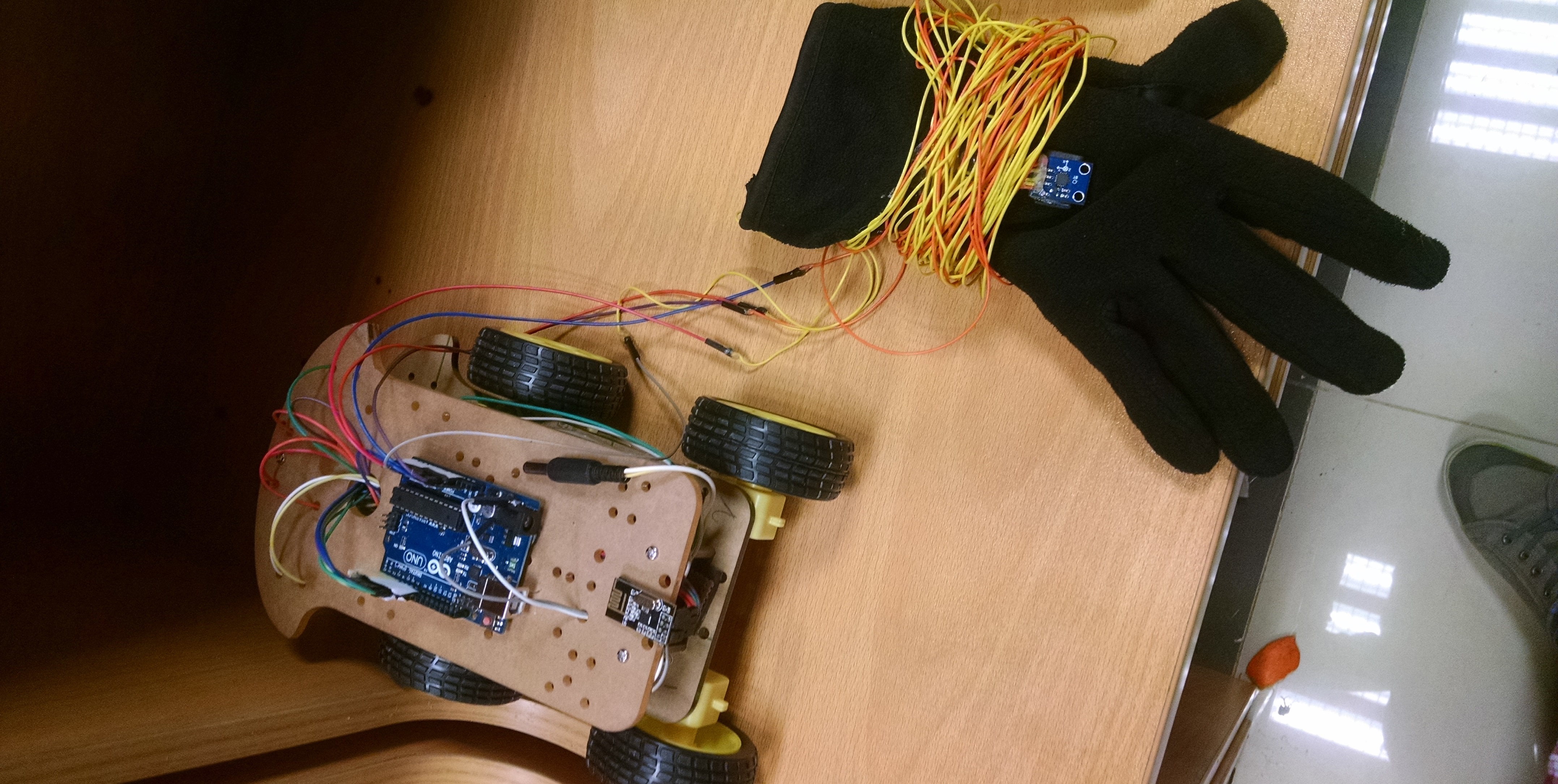
Gesture Control at Mid-Evaluation
Gesture Controlled Robot at its mid-evaluation. Wireless communication is yet to be desgined.
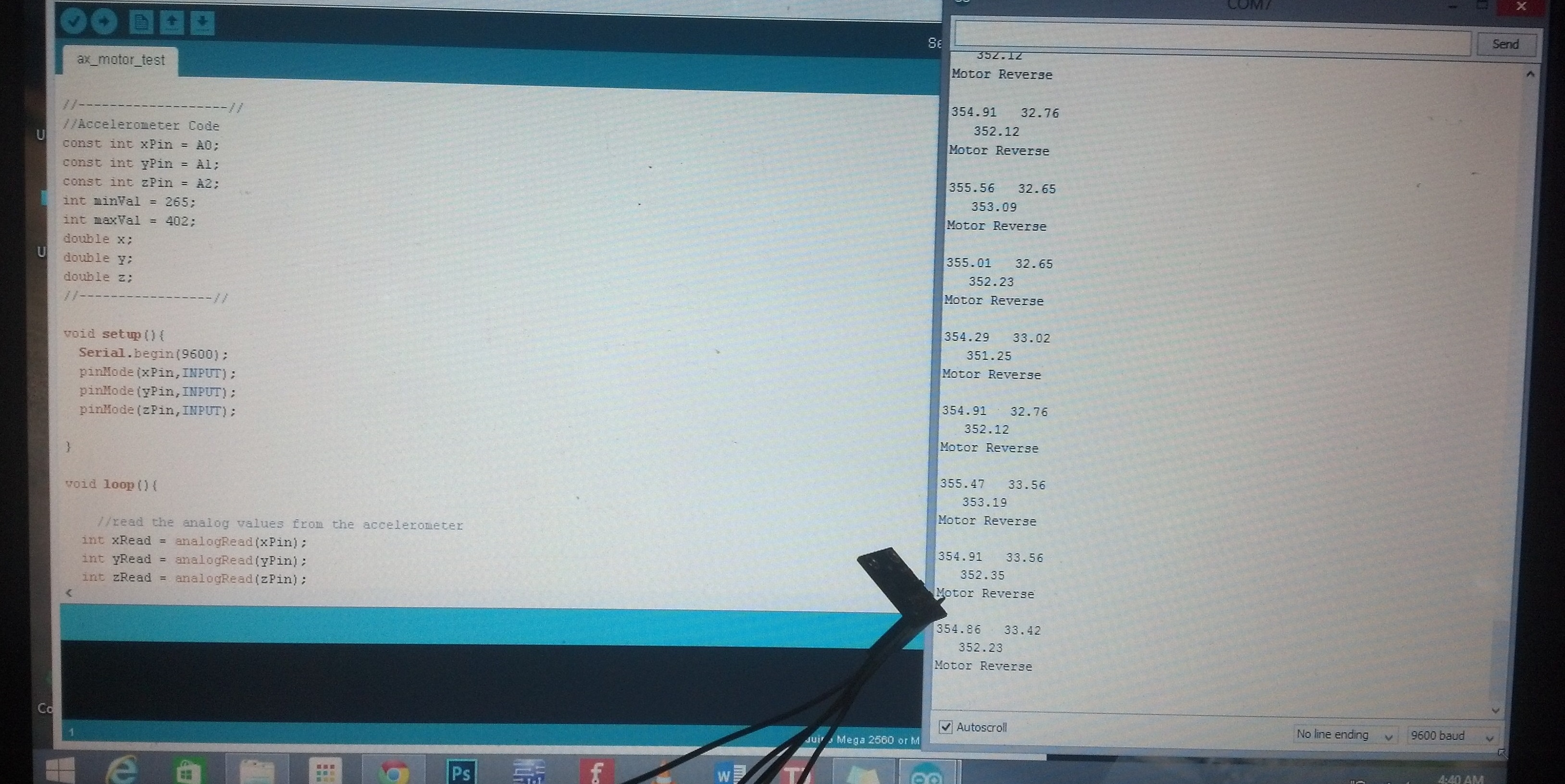
Sensors Calibration
Calibrating ADX335 3-Axis Accelerometer according to hand gestures based on value dependant on +3g to -3g.
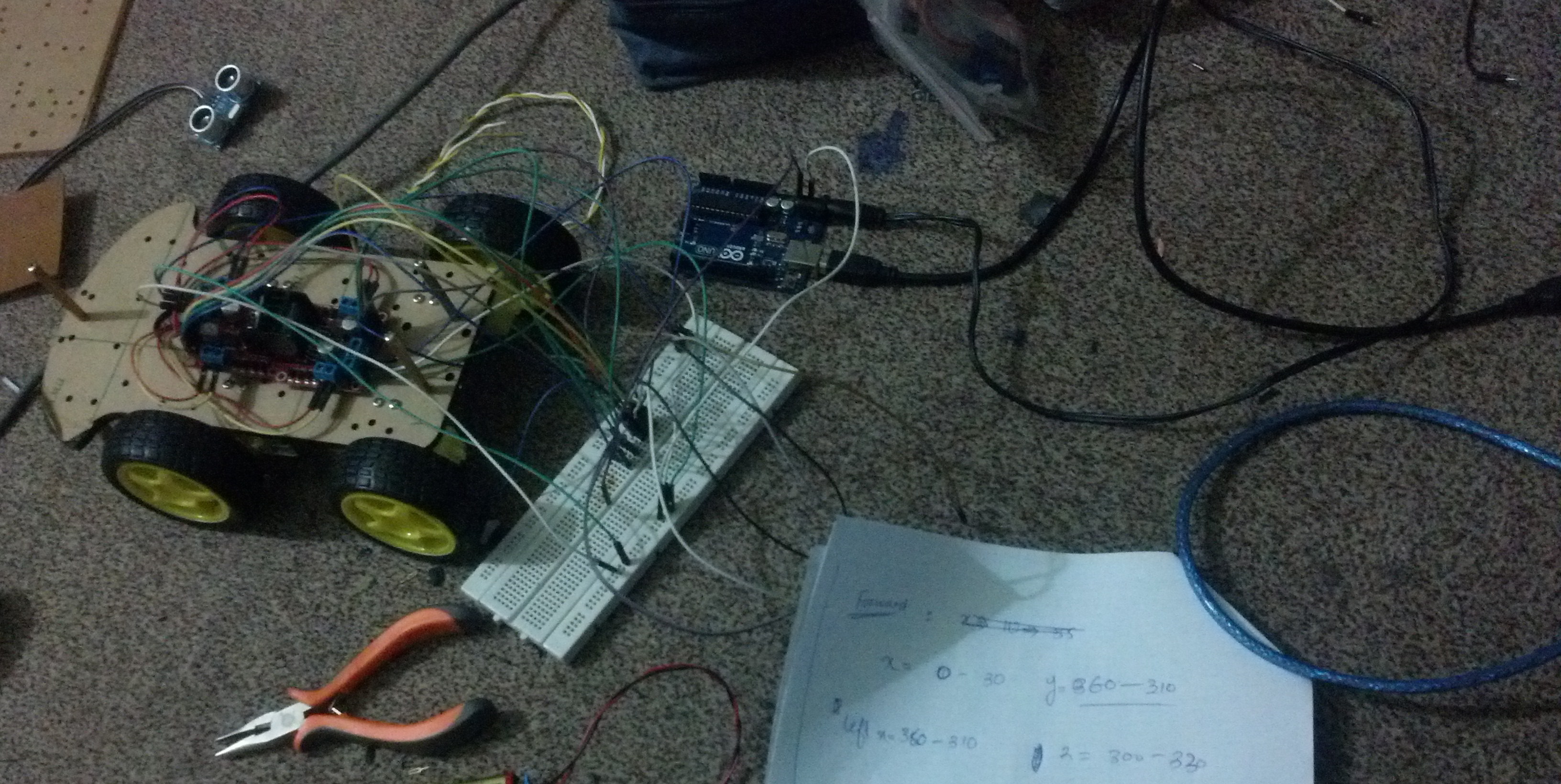
Building Robot
Intial Click of robot at building stage, testing components and assembling chassis.
Introduction
This is a Robotic Project for our first Electrical Engineering major Electronics Course (Linear Circuit Analysis) at Information Technology University, Lahore. We have choose this project after getting inspired from the work done by google i.e. Google Driverless Car, in concept of making gesture controlled steered and drive vehicles. Also we wanted to make autonomous robot which can fly and plot map of any area in which it is exposed to this is based on idea of disaster management to map the available paths in a disaster harmed building. In this semester scope we are going to plot map of regular enviornment using a robotic car.
Date: February, 2015

Project Detail
This project is based on two modules.
- Gesture Controlled Robotic Car
- Autonomous Mapping Using Wave-front Algorithm
This part is inspired from Google Driverless Car, the idea is basically making easy control for steered and derived vehicles.
This part of robot is motivated from the incident of earthquake i.e. 5 October, on which many disasters took place. So it is to form a disaster management product that can help to find available paths in disaster harmed building.

Languages Used
Following are the languages used for making and research of this project.
- Arduino C/C++
- Python 2.6
- Node JS
- Matlab (for processing 2-D Matrices)
- Processing IDE (for GUI of Mapping)
* All above languages are not used in direct relation to project. Most of them are used for preparatory research and prototype building. Also many open source projects are used as well mentioned on acknowledgements page.
Components Used
Following are the components used for making this robot.
- Arduino UNO, Mega and Mini-Pro
- Ultrasonic Sensor (HC-SR04)
- Accelerometer ADXL335
- Pre-Build 4WD DC motors based chassis
- L298n Motor Drivers
- nRF24L01-2.4GHz Radio Frequency Modules
* As per requirement may be Gyro and Magnetometer might be implied to increase the preciseness of Gesture Control. Similarly in mapping algorithm high range IR & Lasers can also be incorporated if needed.